H oμάδα μας οι Real inventors που αποτελείτε από μαθητές Γυμνασίου αποφασίσαμε να φτιάξουμε ένα μπαστούνι με ηλεκτρονικό έλεγχο των εμποδίων που μπορεί να συναντήσει ένας τυφλός για την έγκαιρη αντιμετώπισή τους.
ΠΕΡΙΛΗΨΗ
Το μπαστούνι του τυφλού χρησιμοποιείται για την διευκόλυνση των τυφλών στην αποφυγή εμποδίων και στις καθημερινές τους μεταφορές καθώς είναι δύσκολες με την απώλεια όρασης . Η διαφορά του με τα άλλα μπαστούνια τυφλών είναι ότι έχει αισθητήρες που ανιχνεύουν εμπόδια χωρίς να υπάρχει επαφή του μπαστουνιού . Καθώς και προειδοποιεί για αντικείμενα όπως τοίχους , κάδους και άλλα .
To OER Canvas είναι στο Github
ΥΛΙΚΑ ΠΟΣΟΤΗΤΑ ΚΟΣΤΟΣ
1. ARDUINO UNO 1 X 7,00
2. HC-SR04 2 X 2,50 5,00
3. BUZZER 1 X 0,65
4. 9V ΜΠΑΤΑΡΙΟΘΗΚΗ 1 X 3,00
5. ΑΡΣΕΝΙΚΑ ΚΑΙ ΘΥΛΗΚΑ ΚΑΛΩΔΙΑ 12 X 3,60
6. SERVO 1 X 3,99
7. 9V ΜΠΑΤΑΡΙΑ 1 X 2,00
8 . ΜΠΑΣΤΟΥΝΙ 1 X 22,00
9. ΔΙΑΚΟΠΤΗΣ ON OFF 1X 1,00
Συνολικό ποσό 48,24
Στην κατασκευή μας χρησιμοποιήσαμε 2 αισθητήρες υπερήχων.
Οι υπέρηχοι είναι μεγάλα ηχητικά κύματα με συχνότητες υψηλότερες από το ακουστικό όριο της ανθρώπινης ακοής.
Τα ανθρώπινα αυτιά μπορούν να ακούσουν τα ηχητικά κύματα που δονούν στο εύρος από περίπου 20 φορές το δευτερόλεπτο(20Hz) έως περίπου 20.000 φορές το δευτερόλεπτο (20KHz).
Ωστόσο, ο υπέρηχος έχει συχνότητα άνω των 20.000 Hz και κατά συνέπεια δεν ακούγεται από τον άνθρωπο.
Τεχνικά χαρακτηριστικά
Τάση λειτουργίας 5V
Λειτουργικό ρεύμα 15mA
Συχνότητα λειτουργίας 40KHz
Μέγιστη εμβέλεια 4m
Ελάχιστη απόσταση 2cm
Διακριτική ακρίβεια 1cm
Γωνία μέτρησης 15 μοιρών
Σήμα εισόδου ενεργοποίησης 10μS παλμού TTL
Διαστάσεις 45 x 20 x 15 mm
Πως δουλεύει
Όλα ξεκινούν όταν ένας παλμός τουλάχιστον 10 μS (10 μικροδευτερόλεπτα) σε διάρκεια εφαρμόζεται στον ακροδέκτη Trigger. Ο αισθητήρας μεταδίδει μια ηχητική έκρηξη οκτώ παλμών στα 40 KHz. Αυτό το μοτίβο 8 παλμών καθιστά τη “υπερηχητική υπογραφή” από τη συσκευή μοναδική, επιτρέποντας στον δέκτη να διαφοροποιήσει το μεταδιδόμενο μοτίβο από τον περιβαλλοντικό θόρυβο υπερήχων.
Στην περίπτωση, εάν οι παλμοί δεν αντανακλούν, το σήμα Echo έξοδος του αισθητήρα θα λήξει σε χρονικό όριο μετά από 38 mS (38 χιλιοστά του δευτερολέπτου) και θα επιστρέψει χαμηλά (Low) στα 0 βολτ. Έτσι, ένας παλμός 38 mS δεικνύει κανένα εμπόδιο εντός της εμβέλειας του αισθητήρα.
Αν αυτοί οι παλμοί αντανακλώνται πίσω, ο ακροδέκτης Echo σβήνει αμέσως (χαμηλό δυναμικό) μόλις ληφθεί το σήμα. Αυτό παράγει έναν παλμό του οποίου το πλάτος κυμαίνεται μεταξύ 150 μS έως 25 mS, ανάλογα με το χρόνο που χρειάζεται για να ληφθεί το σήμα.
Το πλάτος του λαμβανόμενου παλμού χρησιμοποιείται στη συνέχεια για τον υπολογισμό της απόστασης προς το ανακλώμενο αντικείμενο.
ΑΠΟΣΤΑΣΗ= ΧΡΟΝΟΣ * ΤΑΧΥΤΗΤΑ (Ταχύτητα είναι η γνωστή ταχύτητα του ήχου που ισούται με 340 m /sec)
ή
ΧΡΟΝΟΣ= ΑΠΟΣΤΑΣΗ / ΤΑΧΥΤΗΤΑ
ή
ΤΑΧΥΤΗΤΑ= ΑΠΟΣΤΑΣΗ / ΧΡΟΝΟΣ
ένα μικρό παράδειγμα υπολογισμού απόστασης σύμφωνα με το προηγούμενο animation που δείχνει τον παλμό echo να διαρκεί 500 μs
Θα χρησιμοποιήσουμε τον τύπο ΑΠΟΣΤΑΣΗ= ΧΡΟΝΟΣ * ΤΑΧΥΤΗΤΑ
Ο χρόνος αυτός είναι διπλός και είναι ο χρόνος που διανύουν οι παλμοί από τον αισθητήρα μέχρι το εμπόδιο και περιλαμβάνεται και ο χρόνος επιστροφής μέχρι τον αισθητήρα έτσι εμείς το χρόνο αυτό θα τον διαιρέσουμε δια του 2
Θα μετατρέψουμε την ταχύτητα του ήχου από m /sec σε cm/μs άρα πολλαπλασιάζουμε με το 100 και διαιρούμε με το 1.000.000
340 * 100 / 1.000.000 = 0.034
ΑΠΟΣΤΑΣΗ= ΧΡΟΝΟΣ * ΤΑΧΥΤΗΤΑ κάνουμε αντικατάσταση
ΑΠΟΣΤΑΣΗ=(500 μs)/2 * 0.034 cm/μs κάνουμε την διαίρεση
ΑΠΟΣΤΑΣΗ=250 μs * 0.034 cm/μs κάνουμε την απλοποίηση μs
ΑΠΟΣΤΑΣΗ=250 * 0.034 cm = 8.5 cm
ΒΗΜΑ 1
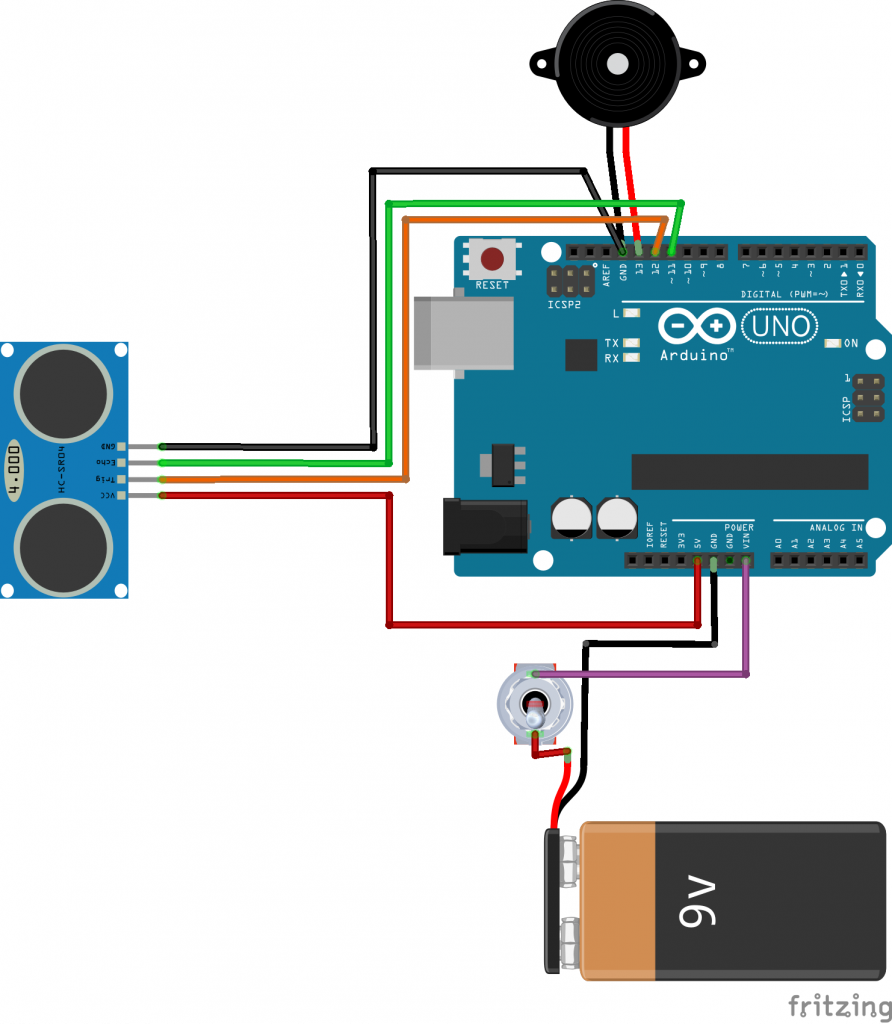
Όπως φαίνεται στην εικόνα 1 συνδέουμε τον πρώτο αισθητήρα , HC-SR04 που χρησιμοποιείται για την ανίχνευση τοίχων . Τον κινητήρα servo , που χρησιμοποιείται για την προειδοποίηση τοίχων. Την 9v μπαταριοθήκη με τον διακόπτη, που χρησιμοποιείται για την τροφοδοσία του arduino. Το HC-SR04 έχει τέσσερις ακροδέκτες το trig , echo , gnd και το vcc. Ο ακροδέκτης trig, συνδέεται με τον ακροδέκτη 9 του arduino. Ο δεύτερος ακροδέκτης echo, συνδέεται με τον ακροδέκτη 10 του arduino . Ο τρίτος ακροδέκτης gnd, συνδέεται με τον ακροδέκτη gnd του arduino . Ο τέταρτος ακροδέκτης vcc , συνδέεται με τον ακροδέκτη 5v του arduino . O κινητήρας servo έχει τρεις ακροδέκτες το gnd , +5v και το digital pin(pulse) . Ο ακροδέκτης gnd καφέ καλώδιο , συνδέεται με τον ακροδέκτη gnd του arduino. Ο δεύτερος , +5v κόκκινο καλώδιο , συνδέεται με τον ακροδέκτη 5v του arduino . Ο τρίτος ακροδέκτης το digital pin κίτρινο καλώδιο , συνδέεται με τον ακροδέκτη 3 του arduino. Η 9v μπαταριοθήκη έχει δυο ακροδέκτες το – και το + . Ο πρώτος , – μαύρο καλώδιο , συνδέεται με τον ακροδέκτη gnd του arduino και ο δεύτερος, το + κόκκινο καλώδιο , συνδέεται με τον ακροδέκτη vin του arduino.

εικόνα 1: Συνδεσμολογία πρώτου αισθητήρα
Αν θέλετε να δοκιμάσετε το αισθητήρα αυτόν ξεχωριστά φορτώστε αυτόν το κώδικα από τον παρακάτω σύνδεσμο στο github και επιλέξτε το αρχείο με όνομα sensor1-test . Στο σειριακό monitor εμφανίζονται οι τιμές της απόστασης .
https://github.com/kgiannaras/cane-blinds/tree/master/arduino-code
και όταν η απόσταση είναι μεταξύ 5 και 65 εκατοστών περιστρέφει τον σερβοκινητήρα από 0 έως 180 μοίρες και αμέσως επιστροφή από 180 έως 0 μοίρες
ΒΗΜΑ 2
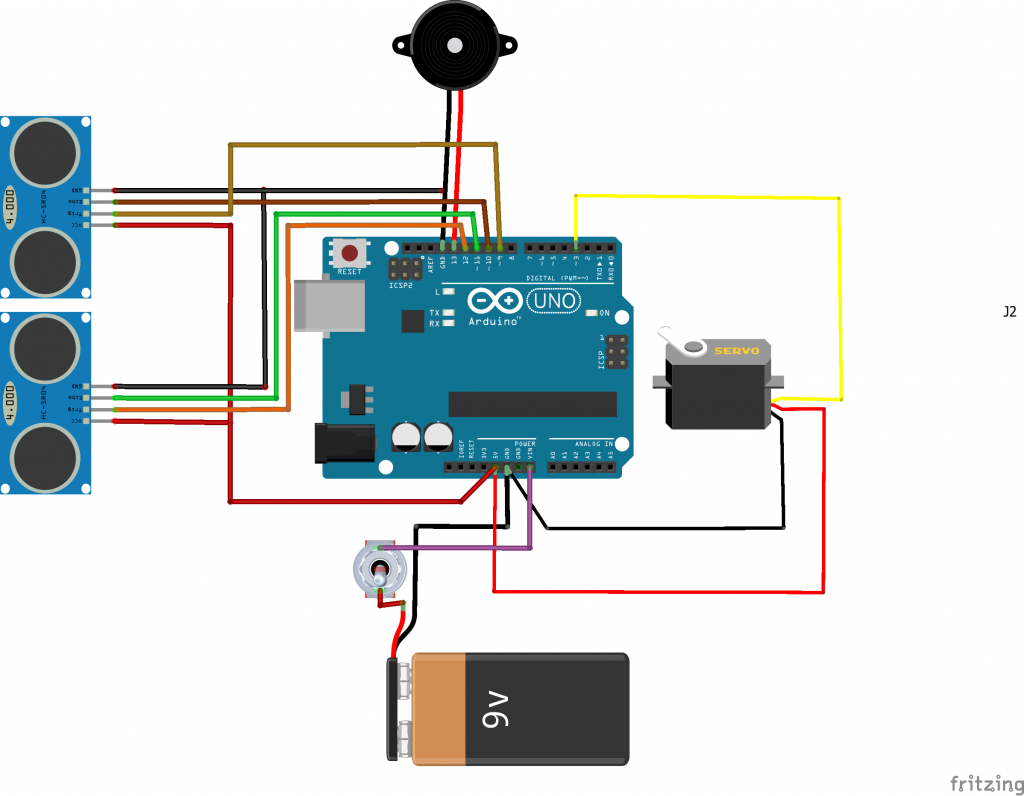
Όπως φαίνεται στην εικόνα 2 συνδέουμε τον δεύτερο αισθητήρα, HC-SR04 που χρησιμοποιείται για την ανίχνευση εμποδίων στα πεζοδρόμια . Το buzzer που χρησιμοποιείται για την προειδοποίηση εμποδίων στα πεζοδρόμια . Την 9v μπαταριοθήκη όπως περιγράψαμε στο βήμα 1 τροφοδοτεί το κύκλωμα μας. Το HC-SR04 έχει τέσσερις ακροδέκτες το trig , echo , gnd και το vcc. Ο πρώτος ακροδέκτης , trig , συνδέεται με τον ακροδέκτη 12 του arduino . Ο δεύτερος ακροδέκτης , echo , συνδέεται με τον ακροδέκτη 11 του arduino . Ο τρίτος gnd , συνδέεται με τον ακροδέκτη gnd του arduino . Ο τέταρτος , vcc , συνδέεται με τον ακροδέκτη 5v του arduino . Το buzzer έχει δυο ακροδέκτες το – και + . Ο πρώτος , – μαύρο καλώδιο , συνδέεται με τον ακροδέκτη gnd του arduino . Ο δεύτερος , + κόκκινο καλώδιο , συνδέεται με τον ακροδέκτη 13 του arduino. Η συνδεσμολογία της 9v μπαταριοθήκη μένει ίδια.
εικόνα 2: Συνδεσμολογία δεύτερου αισθητήρα
Αν θέλετε να δοκιμάσετε το αισθητήρα αυτόν ξεχωριστά φορτώστε αυτόν το κώδικα από τον παρακάτω σύνδεσμο και επιλέξτε το αρχείο με όνομα sensor2-test . Αφού φορτωθεί το sketch στον arduino ανοίγουμε το σειριακό monitor για να εμφανίζονται οι τιμές της απόστασης .
https://github.com/kgiannaras/cane-blinds/tree/master/arduino-code
και ταυτόχρονα όταν ανιχνεύονται εμπόδια από 5 μέχρι 65 εκατοστά θα ακούγεται ο ήχος από το buzzer
με κάποιες διαβαθμίσεις στην διάρκεια του τόνου και παράλληλα θα ακούγεται ο βομβητής με έντονο και ρυθμικά γρηγορότερα ήχο να προειδοποιεί για τα χαμηλά εμπόδια
ΒΗΜΑ 3
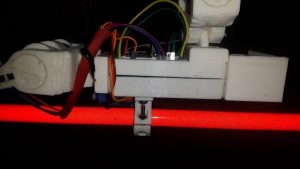
Στην επόμενη εικόνα 3 φαίνεται η τελική συνδεσμολογία της κατασκευής μας.
εικόνα 3: Τελική συνδεσμολογία
Αν θέλετε να δοκιμάσετε τους αισθητήρες αυτούς φορτώστε τον κώδικα από την παρακάτω ιστοσελίδα και επιλέξτε το αρχείο με όνομα cane-distance-serial.ino. Στο σειριακό monitor εμφανίζονται οι τιμές της απόστασης για τους δυο αισθητήρες.
Φορτώστε τον κώδικα cane-distance-noserial από την παρακάτω ιστοσελίδα η διαφορά στο κώδικα είναι ότι δεν περιλαμβάνει εντολές του σειριακού μόνιτορ.
https://github.com/kgiannaras/cane-blinds/tree/master/arduino-code
ΒΗΜΑ 4
Ενώστε την πλακέτα με τον μπαστούνι με έναν από τους δύο τρόπους .
Πρώτος τρόπος:χειροποίητη έκδοση
Ενώστε το Arduino με το μπαστούνι με τον αυτοσχέδιο τρόπο
Αφού τελειώσετε την συνδεσμολογία των αισθητήρων, του servo,της μπαταριοθήκης και του buzzer με το arduino, λόγω της ανάγκης μιας συγκεκριμένης γωνίας των αισθητήρων , ώστε να μπορούν να εντοπίζουν τα εμπόδια , είναι αναγκαία η δημιουργία αξόνων. Αυτούς τους άξονες , τους κατασκευάσαμε χρησιμοποιώντας χαρτόνι, ξυλάκια,σιλικόνη και tire up (δεματικά) .
- Αρχικά , δεν χρησιμοποιήσαμε 9v μπαταρία , αλλά μια μπαταριοθήκη που δέχεται 6 μπαταρίες 2ΑΑ και λόγω των διαστάσεών της , τοποθετήσαμε το arduino από πάνω και τα ενώσαμε με tire up μεταξύ τους και με το μπαστούνι .
- Κόψτε 2 χαρτόνια με διαστάσεις 4 cm x 2 cm και κολλήστε τα με θερμική σιλικόνη στο πίσω μέρος των αισθητήρων .
- Σχεδιάστε και κόψτε 4 ακόμα χαρτόνια , με διαστάσεις 5 cm x 2.5 cm. Πάρτε τα 2 από αυτά και ανάμεσα τους περάστε τα ξυλάκια(άξονες), τρυπώντας τα στο πάνω μέρος. Κάντε το ίδιο και για τον δεύτερο αισθητήρα. Τα 2 ξυλάκια(άξονες) που χρησιμοποιήσαμε έχουν περίπου μήκος 12cm .
- Kολλάμε τα 2 χαρτόνια αριστερά και δεξιά στο πάνω μέρος της μπαταριοθήκης .
- Επαναλάβετε το προηγούμενο βήμα, τοποθετώντας τα άλλα 2 χαρτόνια στο κάτω μέρος της μπαταριοθήκης .
- Τοποθετούμε τους αισθητήρες πάνω στους 2 άξονες και τα ενώνουμε πάλι με θερμική σιλικόνη .
- Το servo το κολλάμε σε ένα σημείο πάνω στο μπαστούνι .
- Το πρόγραμμα αφού έχει ήδη φορτωθεί, όπως αναφέρεται στο βήμα 3, τοποθετήστε έναν διακόπτη on- off, για την εύκολη ενεργοποίησή του (όπως δείχνει και η εικόνα 3) .
Για την παρακολούθηση της έμπρακτης υλοποιήσεις , μπορείτε να μπείτε στο κανάλι μας στο youtube .
https://www.youtube.com/watch?v=C80C3R145f8&t=22s
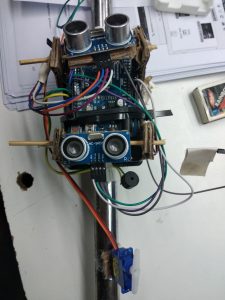

εικόνα 6: Χειροποίητη έκδοση arduino αισθητήρες πάνω στο κοντάρι
Δεύτερος τρόπος
Απαιτείται να υπάρχει 3d εκτυπωτής
ΛΙΣΤΑ 3D ΑΝΤΙΚΕΙΜΕΝΩΝ
Θα πάτε στην παρακάτω ιστοσελίδα https://github.com/kgiannaras/cane-blinds/tree/master/stl και θα κατεβάσετε τα παρακάτω stl αρχεία για να τα εκτυπώσετε σε 3D εκτυπωτή :
ARDUINO
uno-bottom.stl
uno-top.stl
unocase-holder.stl
ΑΙΣΘΗΤΗΡΑΣ HC-SR04
sr04-base.stl 2X
sr04-right.stl 2X
sr04-bottom.stl 2X
sr04left.stl 2X
sr04-up.stl 2X
ΜΠΑΤΑΡΙΟΘΗΚΗ
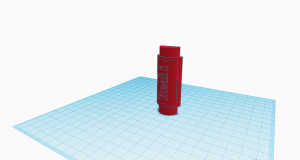
9v-bat.stl
ΛΟΙΠΑ ΚΟΜΜΑΤΙΑ
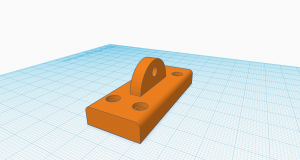
cane-holder.stl
Βίδες Μ4-25mm 2 χ 0,10 0,20
Βίδες Μ3-10mm 4 χ 0,08 0,32
Ξυλόβιδες M3-12mm 14 χ 0,07 0,98
Βίδες Μ4-13mm 1 x 0,10 0,10
Εκτυπώστε τα παρακάτω αρχεία που δείχνουν οι πιο κάτω εικόνες με τα ονόματα τους.
Όλα αυτά τα παρακάτω 3d αντικείμενα εικόνα 1-8 κατέβηκαν από το thinkeverse . Όλα τα αρχεία τροποποιήθηκαν από το tinkercad . Το tinkercad είναι ένα online και δωρεάν πρόγραμμα της autodesk.
Δεν χρειάζεται να κατεβάσετε τίποτα επειδή είναι online το μόνο απαραίτητο είναι η δημιουργία λογαριασμού για να μπορείτε να τροποποιείτε, να δημιουργείτε και να αποθηκεύετε 3d αντικείμενα σε μορφή stl. Ένα κατατοπιστικό βίντεο υπάρχει και στο youtube, στον παρακάτω σύνδεσμο.
Το tinkercad το χρησιμοποιήσαμε για πρώτη φορά και δεν συναντήσαμε καμιά ιδιαίτερη δυσκολία,έχει λίγες συντομεύσεις πλήκτρων , απλό χειρισμό και είναι κατάλληλο πρόγραμμα για πρωτάρηδες. Η μόνη ταλαιπωρεία είναι η χρήση του για λεπτομέρειες που αδυνατεί να επιλέξει επιμέρους επιφάνειες στο αντικείμενο που τροποποιείται.
επιλέξτε τις εικόνες να δείτε τα αντικείμενα σε 3d προβολές μέσω του Github
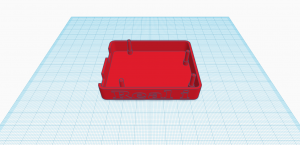
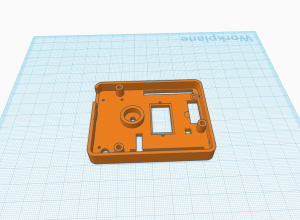
εικόνα 1: uno-bottom εικόνα 2: uno-top
εικόνα 3: unocase-holder εικόνα 4: sr04-right
εικόνα 5: sro4-up εικόνα 6: sro4left
εικόνα 7: sr04-base εικόνα 8: sr04-bottom
ΠΑΡΑΜΕΤΡΟΙ ΕΚΤΥΠΩΤΗ
Τύπος εκτυπωτή: Prusa i3 reprap
Λογισμικό: Repeater
Resolution: 0,2mm Είναι το πάχος του κάθε στρώματος
Infiilling: 20%
Το Infilling είναι μια επαναλαμβανόμενη δομή που χρησιμοποιείται για να καταλαμβάνει χώρο μέσα σε μια κατά τα άλλα κενή 3D εκτύπωση. Όσο πιο μεγάλο το infilling τόσο πιο πολύ το πλαστικό άρα μεγαλύτερο κόστος, αντοχή, και χρόνος εκτύπωσης.
Υλικό: PLA 1.75 mm
BHMA 1
Βιδώνουμε πρώτα τo unocase-holder που ενώνει την συσκευή με το μπαστούνι εικόνα 9. Μετά τοποθετούμε το sro4-base του ενός αισθητήρα στο πάνω μέρος του uno-bottom εικόνα 10 , βιδώνοντας μόνο τις 2 κάτω βίδες .Έπειτα, πάνω από τις βίδες που χρησιμοποιήσαμε για να ενώσουμε την θήκη του arduino με το στήριγμα , βάζουμε μονωτική ταινία για αν μην γίνει βραχυκύκλωμα εικόνα 10.


εικόνα 9: uno-bottom με unocase-holder εικόνα 10:uno-bottom με sr04-base
ΒΗΜΑ 2
Ενώνουμε την 9v-bat με το uno-bottom του arduino εικόνα 11, βιδώνοντας μόνο τις 2 κάτω βίδες . Πριν το κάνουμε αυτό , πρέπει να τοποθετήσουμε το arduino , γιατί αλλιώς δε θα μπορέσουμε να το βάλουμε , λόγω των περισσευμάτων των βιδών που έχουν διαπεράσει την θήκη του .

εικόνα 11: τοποθέτηση arduino μέσα στη θήκη
BHMA 3
Βάζουμε την μπαταρία στην μπαταριοθήκη και την κλείνουμε με το καπάκι. Αφού πρώτα περάσουμε τα καλώδια της μπαταρίας μέσα από το κενό άνοιγμα που υπάρχει δίπλα από το βύσμα εξωτερικής τροφοδοσίας, σύμφωνα με την εικόνα 12.

εικόνα 12: τα καλώδια της μπαταρίας
ΒΗΜΑ 4
Βάζουμε στο uno-top το επάνω καπάκι της θήκης του arduino το buzzer και τον διακόπτη και μετά τα συνδέουμε με τους ακροδέκτες στις προαναφερόμενες ακίδες. Έπειτα βάζουμε τo sr04-base του άλλου αισθητήρα στο κενό χώρο που υπάρχει πάνω στο uno-top εικόνα 13 και εικόνα 14, στην ίδια ευθεία με τις υπάρχοντες τρύπες των 2mm που έχουν γίνει με το σχεδιαστικό πρόγραμμα για να περνάνε οι ξυλόβιδες των 3mm πιο εύκολα.


εικόνα 13 εικόνα 14
ΒΗΜΑ 5
Ενώνουμε τα κομμάτια του αισθητήρα με τον παρακάτω τρόπο που φαίνεται στην εικόνας 15.
Στην εικόνα 16 φαίνεται ο αισθητήρας να έχει τοποθετηθεί μέσα στις δυο θήκες του.

εικόνα 15: αισθητήρας μέσα στην sr04-top θήκη του

εικόνα 16: ο αισθητήρας με τις 2 θήκες του
Στην εικόνα 17 έχουν τοποθετηθεί και τα δυο πλαϊνά στηρίγματα που τον βοηθούν να περιστρέφονται σε όλες τις επιθυμητές γωνίες αφού βάλουμε και τις απαραίτητες βίδες και παξιμάδια.

εικόνα 17: πλήρης συναρμολόγηση αισθητήρα
ΒΗΜΑ 6
Βιδώνουμε τους αισθητήρες στις βάσεις τους χρησιμοποιώντας τις βίδες 4 Μ-25 χιλιοστών μήκους εικόνα 18 και εικόνα 19.


εικόνα 18 τοποθέτηση πρώτου αισθητήρα εικόνα 19: τοποθέτηση και του δεύτερου αισθητήρα
ΒHMA 7
Ενώνουμε το servo στο πίσω μέρος του uno bottom του arduino εικόνα 20, πάνω από το στήριγμα που ενώνει τη συσκευή με το μπαστούνι, χρησιμοποιώντας θερμική σιλικόνη.

εικόνα 20: τοποθέτηση servo
ΒΗΜΑ 8
Ενώνουμε όλα τα καλώδια στο arduino , σύμφωνα με τα προηγούμενα σχεδιαγράμματα, όπως φαίνεται στην εικόνα 21.

εικόνα 21: πλήρης συναρμολόγηση
ΒΗΜΑ 9
Ενώνουμε το arduino με το μπαστούνι , βιδώνοντας τα, όπως δείχνει η εικόνα 22 .
εικόνα 22: Συναρμολόγηση κατασκευής με το μπαστούνι
ΒΗΜΑ 10
Για να μπορεί να βρει ο τυφλός προς τα που ‘κυττάει’ η συσκευή με τους αισθητήρες, προσθέσαμε ένα δαχτυλίδι με το οποίο θα μπορεί να βρει τον προσανατολισμό του προς αυτήν , χάρις το εξόγκωμα του, όπως στην εικόνα 23 .

εικόνα 23: τοποθέτηση ειδικού δαχτυλιδιού
OPENSHOT

Τόσο το βίντεο της παρουσίασης, όσο και τα υπόλοιπα βίντεο που υπάρχουν και στο youtube, από την ομάδα μας, έχουν δημιουργηθεί στο πρόγραμμα openshot. Το openshot, είναι ένα πρόγραμμα ανοικτού λογισμικού που ο καθένας μπορεί να το κατεβάσει από την ιστοσελίδα του κατασκευαστή, αναγράφεται παρακάτω. https://www.openshot.org/
AUDACITY
Όλοι οι διάλογοι στα βίντεο μας έχουν δημιουργηθεί με το εξίσου ελεύθερο λογισμικό επεξεργασίας ήχου το audacity. Ακολουθεί σύνδεσμος που οδηγεί στην επίσημη ιστοσελίδα του, όπου θα πρέπει να το κατεβάσετε για να δημιουργήσετε ήχους και φυσικά θα εντυπωσιαστείτε για την εύκολη λειτουργία του
ΠΡΑΚΤΙΚΕΣ ΜΕΤΡΗΣΕΙΣ
Σύμφωνα με τον κώδικα ο arduino θα παράγει 2 ήχους στο buzzer. Ο ένα είναι αργός και δημιουργείτε όταν η απόσταση του αισθητήρα από το πεζοδρόμιο είναι από 165 cm έως 136 cm. Ο άλλος είναι πιο γρήγορος και δημιουργείτε όταν η απόσταση του αισθητήρα από το πεζοδρόμιο είναι από 135 cm έως 110 cm. Στον αργό ήχο η απόσταση του άκρου του μπαστουνιού μέχρι το πεζοδρόμιο είναι 67 cm έως 103 cm και από 30 cm μέχρι 65 cm ακούγεται ο γρήγορος ήχος. Έτσι καταφέραμε να κάνουμε το τυφλό να καταλαβαίνει αν το εμπόδιο είναι κοντά ή μακριά πριν χτυπήσει το μπαστούνι στο εμπόδιο. Όταν το μπαστούνι φτάσει σε λιγότερο από 30 cm απόσταση από το χαμηλό εμπόδιο ο ήχος σταματάει.
Επιπλέον λόγω της χρήσης του δεύτερου αισθητήρα και της διαφορετικής γωνίας σε σχέση με το πρώτο θα μπορεί τώρα ο τυφλός από την δόνηση του servo κινητήρα να καταλαβαίνει αν το εμπόδιο είναι ένας τοίχος ή μια κολόνα. Δημιουργεί μία δόνηση που παράγετε όταν ο αισθητήρας απέχει 65 cm έως 165 cm από τον τοίχο. Τότε η απόσταση του άκρου του μπαστουνιού μέχρι τον τοίχο είναι από 0 cm έως 100 cm. Η δε γωνία που σχηματίζει ο αισθητήρας μας είναι περίπου 28,4 º. Προκειμένου ,λοιπόν να μετράει σωστά τις αποστάσεις και να ειδοποιεί σκόπιμα τον τυφλό θα πρέπει να γυρίσουμε τον αισθητήρα στις αναφερόμενες μοίρες. Ακόμα και αν οι μοίρες που μπορεί να εντοπίσει τα εμπόδια διαφέρουν από τις 28,4 δεν πειράζει, αφού η τιμή είναι το αποτέλεσμα των παρακάτω μαθηματικών πράξεων και υπάρχουν πιθανότητες να διαφέρουν στην πραγματική εφαρμογή τους. 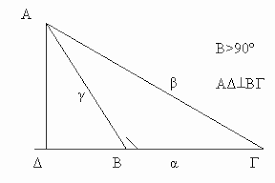

Το Α είναι ο αισθητήρας.
Η ΑΔ είναι η κάθετη απόσταση του αισθητήρα από το πάτωμα. Η ΑΒ ή γ είναι το μήκος του μπαστουνιού από τον αισθητήρα και κάτω. Η ΔΒ είναι η απόσταση από το άκρο του μπαστουνιού έως το σημείο Δ. Η β είναι η απόσταση του αισθητήρα έως το χαμηλό εμπόδιο. Η α είναι η απόσταση από το άκρο του μπαστουνιού έως το χαμηλό εμπόδιο .
Ήδη γνωρίζαμε την ΑΔ=58cm και την ΑΒ=80cm και ψάχναμε την ΔΒ και την βρήκαμε με το Πυθαγόρειο Θεώρημα.
ΑΒ²=ΔΒ²+ΑΔ²
ΔΒ²=ΑΒ²-ΑΔ²
Τέλος βρήκαμε ότι ΔΒ=0,55cm.
Θεωρήσαμε ότι α=100cm και εφαρμόσαμε το Θεώρημα της αμβλείας γωνίας.
β²=α²+γ²+2•α•ΒΔ
Βρήκαμε ότι β=165cm και για αυτό στον κώδικα βάλαμε την τιμή του β για να αρχίζει ο ήχος. Αντίστοιχα μπορείτε και εσείς να υπολογίσετε μια υποτείνουσα τέτοιου τριγώνου αν γνωρίζετε τη α.
Νόμος των συνημιτόνων
α² =β²+γ²-2βγσυνΑ
Όλες οι πλευρές είναι γνωστές, εκτός από το συνΑ . Όπότε τις κατάλληλες μοίρες για τον αισθητήρα θα τις βρούμε με την επίλυση του παραπάνω τύπου.
συνΑ=β²+γ²-α²/2βγ
συνΑ=2,3625/2,64
συνΑ=0,89
Άρα η γωνία Α ισούται με 26,5º. Ενώ πρακτικά υπολογίστηκε γύρω στις 30 μοίρες
Σας ευχαριστούμε για την παρακολούθηση της ιστοσελίδας μας , η δημιουργία της οποίας έγινε από τους:
Τρελλοπούλου Παναγιώτα
Κρανιδιώτη Γιώργο