Γενικό Πρόβλημα

Η ρύπανση του νερού αποτελεί σημαντικότατο περιβαλλοντικό πρόβλημα της εποχής μας. Ένα μέρος αυτού του προβλήματος είναι και τα σκουπίδια που κάποιοι ασυνείδητοι πετούν στο νερό. Αυτή η συμπεριφορά έχει ως αποτέλεσμα τη μόλυνση του νερού που με τον καιρό οδηγεί στη μετατροπή των ποταμών, των λιμνών και των θαλασσών σε σκουπιδότοπους.
Το πρόβλημα στο χώρο του Πανεπιστημίου
 Το πρόβλημα της ρύπανσης μπορεί να εμφανίζεται ακόμα και σε κατασκευές του ανθρώπου όπως οι ανοιχτές δεξαμενές και τα σιντριβάνια. Στο Πανεπιστήμιο Πατρών υπάρχουν αρκετά σιντριβάνια τα οποία είναι γεμάτα με φύλλα και σκουπίδια παρουσιάζοντας άσχημη εικόνα. Το φαινόμενο αυτό τις περισσότερες φορές οδηγεί σε βλάβες των μηχανισμών των σιντριβανιών και συνεπώς στο άδειασμά τους. Την ίδια εικόνα εμφανίζουν και πολλά σιντριβάνια στο κέντρο της πόλης.
Το πρόβλημα της ρύπανσης μπορεί να εμφανίζεται ακόμα και σε κατασκευές του ανθρώπου όπως οι ανοιχτές δεξαμενές και τα σιντριβάνια. Στο Πανεπιστήμιο Πατρών υπάρχουν αρκετά σιντριβάνια τα οποία είναι γεμάτα με φύλλα και σκουπίδια παρουσιάζοντας άσχημη εικόνα. Το φαινόμενο αυτό τις περισσότερες φορές οδηγεί σε βλάβες των μηχανισμών των σιντριβανιών και συνεπώς στο άδειασμά τους. Την ίδια εικόνα εμφανίζουν και πολλά σιντριβάνια στο κέντρο της πόλης.
Η λύση μας
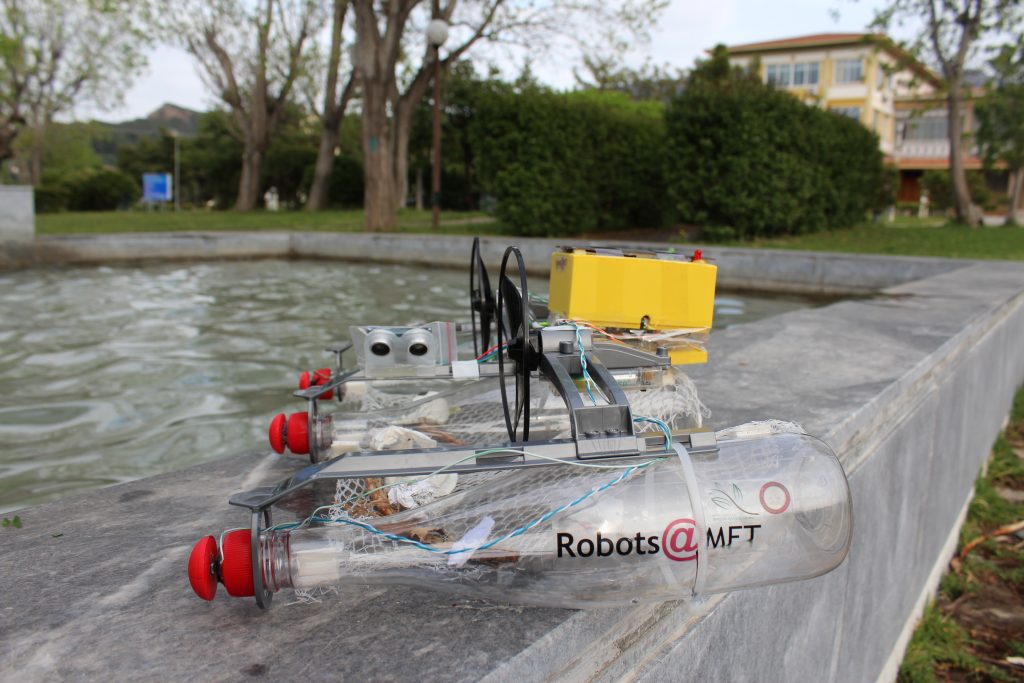
Η ιδέα μας ήταν η κατασκευή ενός αυτόνομου πλωτού ρομποτικού οχήματος το οποίο θα αναλαμβάνει να μαζεύει τα σκουπίδια από τα σιντριβάνια του Πανεπιστημίου, ώστε να διασφαλίζεται η σωστή λειτουργία τους και έτσι να συνεισφέρουν και στην αισθητική αναβάθμιση του χώρου. Η τεχνολογική μας λύση θα παρουσιαστεί στην πανεπιστημιακή κοινότητα και θα δοκιμαστεί σε πραγματικές συνθήκες στα σιντριβάνια του πανεπιστημίου.
 Το ρομποτικό όχημα θα σαρώνει την επιφάνεια του σιντριβανιού συλλέγοντας τα φύλλα, τα πλαστικά και τα υπόλοιπα σκουπίδια. Έπειτα θα τα συγκεντρώνει σε ειδικά διαμορφωμένο κάδο μέσα στο σώμα του. Το ρομπότ επίσης θα έχει τη δυνατότητα να αναγνωρίζει πότε γέμισε ο κάδος και να πλησιάζει τα τοιχώματα για να τον αδειάσει ο χρήστης. Το άδειασμα του κάδου θα μπορεί να γίνεται χωρίς να σταματήσει το ρομπότ τη λειτουργία του.
Το ρομποτικό όχημα θα σαρώνει την επιφάνεια του σιντριβανιού συλλέγοντας τα φύλλα, τα πλαστικά και τα υπόλοιπα σκουπίδια. Έπειτα θα τα συγκεντρώνει σε ειδικά διαμορφωμένο κάδο μέσα στο σώμα του. Το ρομπότ επίσης θα έχει τη δυνατότητα να αναγνωρίζει πότε γέμισε ο κάδος και να πλησιάζει τα τοιχώματα για να τον αδειάσει ο χρήστης. Το άδειασμα του κάδου θα μπορεί να γίνεται χωρίς να σταματήσει το ρομπότ τη λειτουργία του.
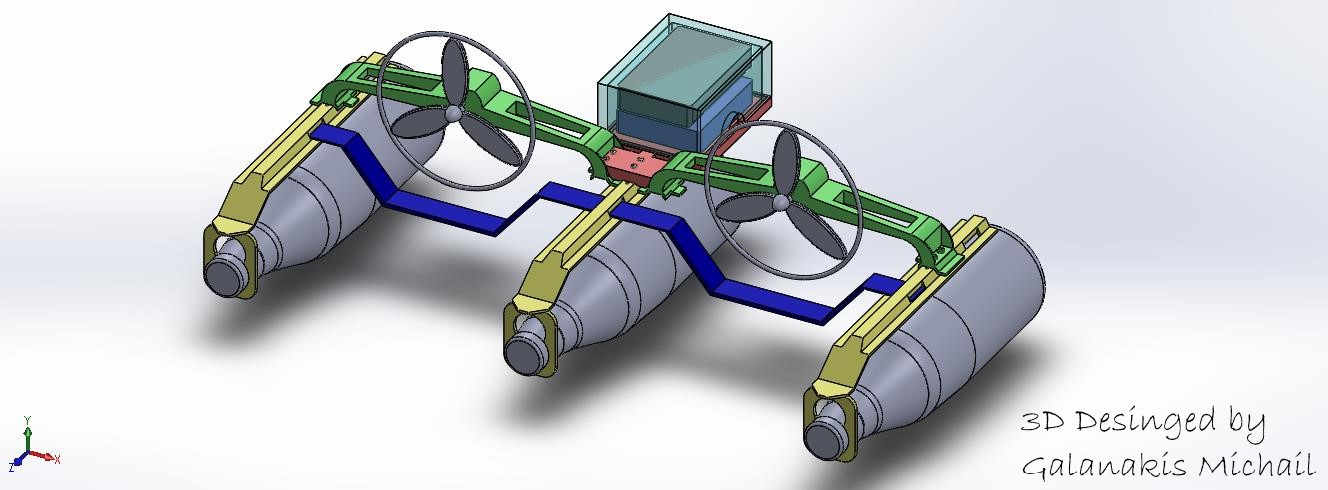
3D Σχέδια
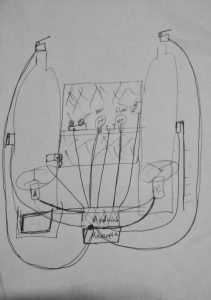
Σχηματικό Διάγραμμα Κατασκευής
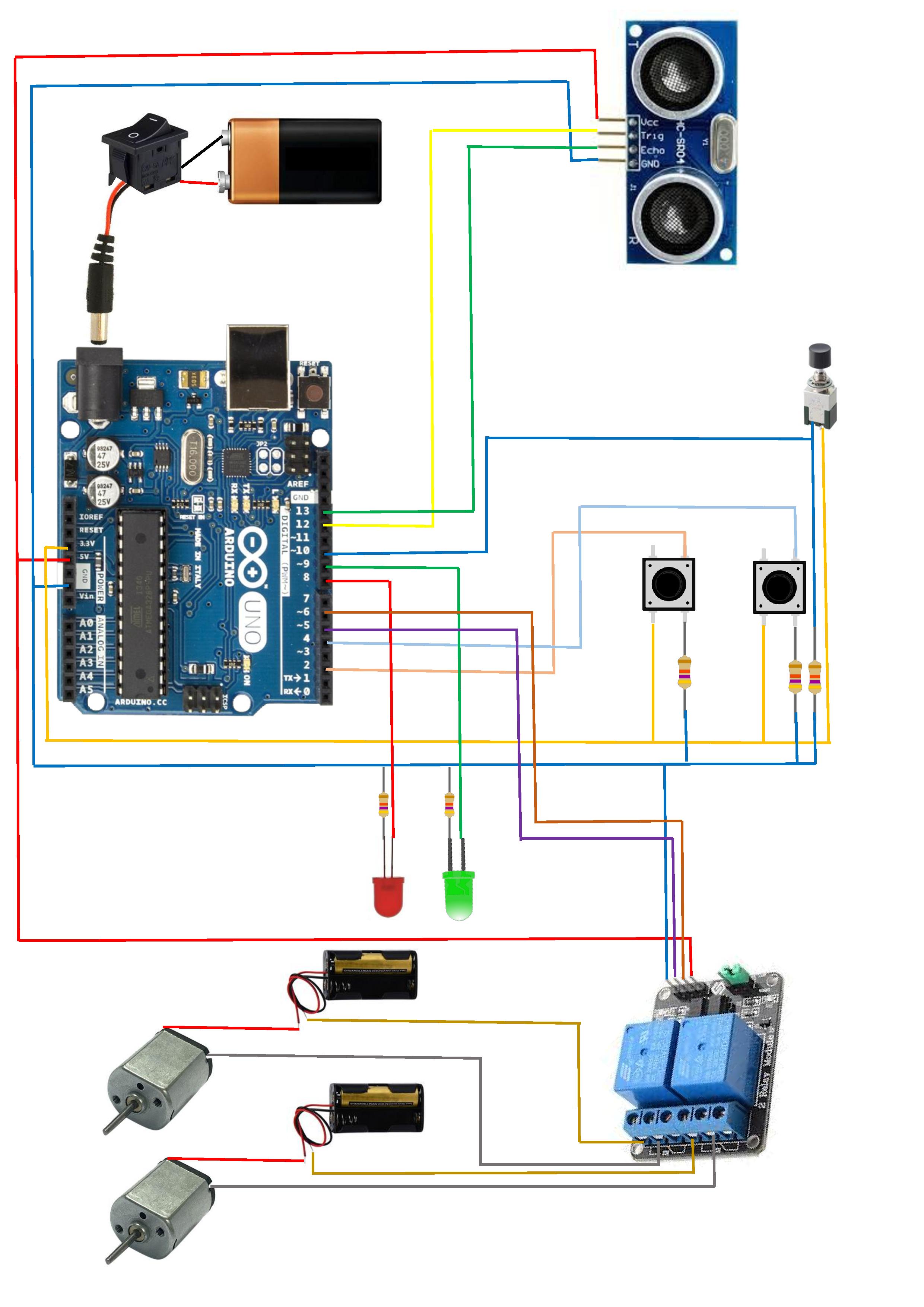
Υλικά κατασκευής (και ενδεικτικές τιμές)
- (x1) Arduino Uno – 15 €
- (x2) Κινητήρες DC – 10 €
- (x1) Relay Module με 2 ρελέ – 5 €
- (x1) Αισθητήρας Απόστασης Ultrasonic – 3 €
- (x1) Βάση Ultrasonic – 0.50 €
- (x2) Push Buttons – 1 €
- (x1) Διακόπτης με επαναφορά – 0.50 €
- (x1) Διακόπτης χωρίς επαναφορά – 0.50 €
- (x1) Καλώδια μονόκλωνα – 1 €
- (x5) Αντιστάσεις – 0.50 €
- (x6) Μπαταρία 9V- 2€
- (x1) Θήκη για 9V Μπαταρία – 1 €
- (x2) Έλικα – 1 €
- (x3) Μπουκάλι 1L – 1 €
- (x1) Μονωτική Ταινία – 1 €
ΣΥΝΟΛΟ: 43 €
Εξοπλισμός που χρησιμοποιήθηκε
- 3D Εκτυπωτής
- Πιστόλι Σιλικόνης
- Κολλητήρι
Βήματα για την κατασκευή
- Τυπώνουμε στον 3D Printer τα σχέδια για το σασί του ρομπότ. Τα σχέδια είναι διαθέσιμα σε όλους στην σελίδα του έργου μας στο github.
- Συναρμολογούμε το σασί με τα μπουκάλια.
- Τοποθετούμε τις έλικες με τη βάση των μπαταριών και τον κινητήρα στη θέση τους πάνω στο σασί
- Τοποθετούμε στα κουμπιά τις τυπωμένες επιφάνειες επαφής και με θερμόκολα τα κολλάμε πάνω στα καπάκια από τα μπουκάλια.
- Τοποθετούμε το Arduino στη βάση του.
- Τοποθετούμε τον ultrasonic στη βάση του και την κολλάμε πάνω στο σασί ώστε να βλέπει το δύχτι για τα σκουπίδια.
- Ακολουθώντας το σχηματικό διάγραμμα κάνουμε τις απαραίτητες συνδέσεις. Αρχικά σε δοκιμαστικό επίπεδο με χρήση breadboard και στη συνέχεια με μονόκλωνο καλώδιο και κολλητήρι.
- Κόβουμε το ένα καλώδιο από την παροχή των μπαταριών στο arduino και τοποθετούμε τον διακόπτη ώστε να μπορούμε να ανοιγοκλείνουμε το ρομπότ εύκολα.
- Προσαρμόζουμε τα δύο κουμπιά και τοποθετούμε τα δύο led στο κάλλυμα του arduino και το τοποθετούμε στη θέση του ώστε να στεγανοποιήσουμε το arduino.
- Με χρήση μονωτικής ταινίας κολλάμε στο σασί τα καλώδια από τα μπροστινά κουμπιά, τον αισθητήρα και τους κινητήρες ώστε να μην πετάνε.
Αλγόριθμος Λειτουργίας
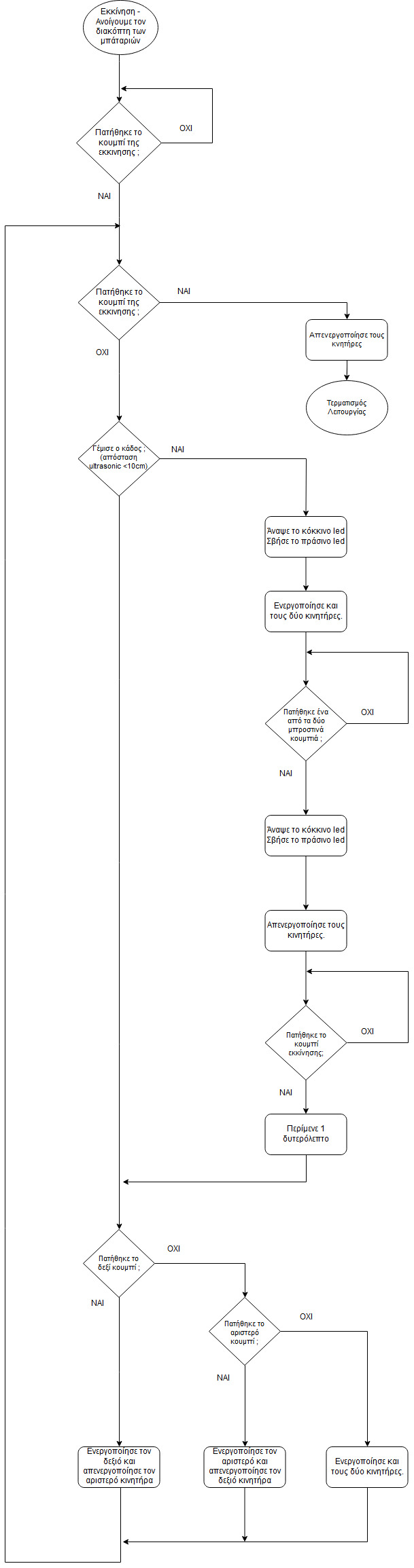
Ο αναλυτικός κώδικας του Arduino βρίσκεται στο αποθετήριο της ομάδας μας στο GitHub. Σύνδεσμος για το GitHub υπάρχει στο τέλος της σελίδας.
Η ομάδα μας
Η ομάδα μας αποτελείται από μικρούς ρομποτιστές, μαθητές Δημοτικών σχολείων της Πάτρας, μέλη της δράσης εκπαιδευτικής ρομποτικής “Robots@ΜΕΤ” του Πανεπιστημίου Πατρών.
Μέλη Ομάδας:
- Βούρος Παύλος – Ε’ Δημοτικού
- Γαλανάκης Ανδρέας – ΣΤ’ Δημοτικού
- Δέμης Σπύρος – Δ’ Δημοτικού
- Κουστουμπάρδης Διονύσης – Δ’ Δημοτικού
- Κουστουμπάρδης Νικόλας – Ε’ Δημοτικού
Προπονητής:
Ανατολιωτάκης Νίκος – Φοιτητής ΗΜΤΥ
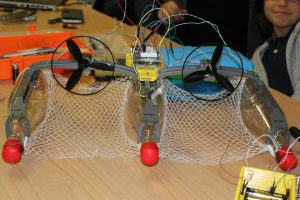
Παρουσίαση του ρομπότ από τα παιδιά
Χρήσιμοι Σύνδεσμοι










Robots@MET
