
Ρομποτ-οδηγος για τυφλους
Walking stick for blind people
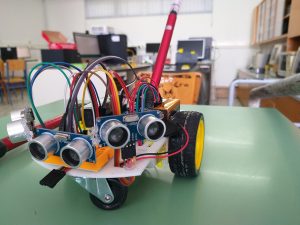
Σας παρουσιάζουμε το robot μας το οποίο ειδικεύεται στην προστασία και ασφάλεια των τυφλών. Mέσω αισθητήρων εντοπίζει τα εμπόδια μπροστά του, σταματάει, πηγαίνει λίγο πίσω και βάση των μετρήσεων από τους περιφερειακούς αισθητήρες απόστασης, στρίβει και επιλέγει την καλύτερη διαδρομή χωρίς εμπόδια. Ο τυφλός κρατάει το μπαστούνι (βλέπετε μόνο το μισό στα τεστ μας για λόγους ευκολίας), και καθοδηγείται από αυτό ώστε να προσπεράσει οποιαδήποτε διαδρομή χωρίς δυσκολία. Όταν εντοπίσει εμπόδιο το μπαστούνι του δονείται και τον πληροφορεί για αλλαγή της πορείας του.
[youtube https://www.youtube.com/watch?v=9IteTRwSr0s]
ΥΛΙΚΑ:
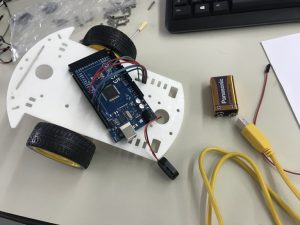
- Arduino mega
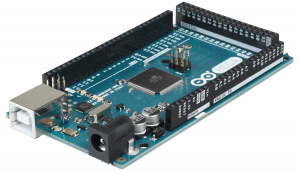 Το Arduino Mega είναι πιο εξελιγμένη πλακέτα της τεχνολογίας Arduino και προτείνεται γιαπερίπλοκες κατασκευές που απαιτούν μεγαλύτερη μνήμη και περισσότερες εισόδους/εξόδους. Το μοντέλο mega 2560 της οικογένειας Arduino είναι το πιο διαδεδομένο και είναι συμβατό με πλήθος αισθητήρων και επεκτάσεων, βασίζεται στην ίδια αρχιτεκτονική με την πλακέτα Uno και η βασική της διαφορά είναι η χωρητικότητα της μνήμης και το πλήθος των εισόδων εξόδων για την σύνδεση με εξωτερικές συσκευές.
Το Arduino Mega είναι πιο εξελιγμένη πλακέτα της τεχνολογίας Arduino και προτείνεται γιαπερίπλοκες κατασκευές που απαιτούν μεγαλύτερη μνήμη και περισσότερες εισόδους/εξόδους. Το μοντέλο mega 2560 της οικογένειας Arduino είναι το πιο διαδεδομένο και είναι συμβατό με πλήθος αισθητήρων και επεκτάσεων, βασίζεται στην ίδια αρχιτεκτονική με την πλακέτα Uno και η βασική της διαφορά είναι η χωρητικότητα της μνήμης και το πλήθος των εισόδων εξόδων για την σύνδεση με εξωτερικές συσκευές.
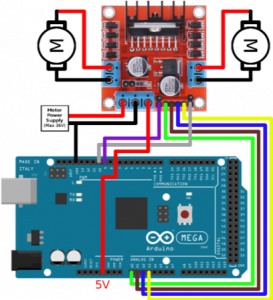
2. L298N Motor Driver

Το L298N είναι ένας οδηγός για κινητήρες συνεχούς ρεύματος. Με αυτό το πλακετάκι μπορείς να δώσεις κίνηση στους κινητήρες σου, υποστηρίζει έως δύο κινητήρες μέγιστης ισχύς 2A ανά κινητήρα. Μικρός σε μέγεθος για εφαρμογή σε πλήθος κατασκευών, διαθέτει κλέμες για την σύνδεση των κινητήρων και του ρεύματος. Έχεις την δυνατότητα να το χρησιμοποιήσεις και σε μεγαλύτερο εύρος εφαρμογών εκτός από κινητήρες, όπως ρελέ, solenoids, DC ή Stepper κινητήρες.
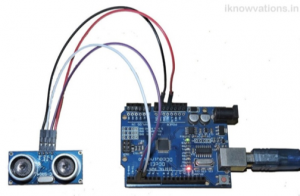
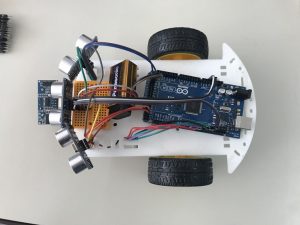
3. Αισθητήρες Υπερήχων(χ4).
 Οι αισθητήρες HC-SR-04, χρησιμοποιούνται για να υπολογιστεί η απόσταση από από το κοντινότερο αντικείμενο κατανοήσουν. Έχουμε ένα εμπρός, έναν δεξιά και έναν αριστερά στο εμπρός μέρος της κατασκευής μας για να ελέγχουμε την περιοχή μπροστά. Επίσης έχουμε τοποθετήσει έναν ακόμη ο οποίος βλέπει προς το πάτωμα έτσι ώστε να καταλαβαίνει αν υπάρχει μπροστά σκαλοπάτι.
Οι αισθητήρες HC-SR-04, χρησιμοποιούνται για να υπολογιστεί η απόσταση από από το κοντινότερο αντικείμενο κατανοήσουν. Έχουμε ένα εμπρός, έναν δεξιά και έναν αριστερά στο εμπρός μέρος της κατασκευής μας για να ελέγχουμε την περιοχή μπροστά. Επίσης έχουμε τοποθετήσει έναν ακόμη ο οποίος βλέπει προς το πάτωμα έτσι ώστε να καταλαβαίνει αν υπάρχει μπροστά σκαλοπάτι.
4. Breadboard.
 Μία πλακέτα διασύνδεσης χωρίς κολλήσεις ή ράστερ(breadboard). Η τοποθέτηση των εξαρτημάτων, δεν χρειάζεται κόλληση, είναι προσωρινή και έτσι τόσο τα εξαρτήματα όσο και το breadboard μπορούν να επαναχρησιμοποιηθούν.
Μία πλακέτα διασύνδεσης χωρίς κολλήσεις ή ράστερ(breadboard). Η τοποθέτηση των εξαρτημάτων, δεν χρειάζεται κόλληση, είναι προσωρινή και έτσι τόσο τα εξαρτήματα όσο και το breadboard μπορούν να επαναχρησιμοποιηθούν.
- 3D εκτύπωση βάσης

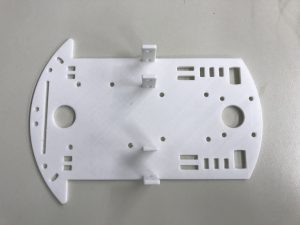
Η τρισδιάστατη εκτύπωση (3D printing) είναι μια μέθοδος προσθετικής κατασκευής στην οποία κατασκευάζονται αντικείμενα μέσω της διαδοχικής πρόσθεσης επάλληλων στρώσεων υλικού. Στη τρισδιάστατη εκτύπωση μπορούν να χρησιμοποιηθούν διάφοροι τύποι υλικού, εμείς χρησιμοποιήσαμε PLA. Η βάση που χρησιμοποιήσαμε για την κατασκευή μας είναι αυτή της φωτογραφίας και το stl αρχείο εκτύπωσης το βρήκαμε στον παρακάτω σύνδεσμο:
https://grabcad.com/library/arduino-2wd-robot-chassis-1
- Καλώδια για εύκολη σύνδεση μεταξύ των συσκευών

7. 2 DC motors με ρόδες
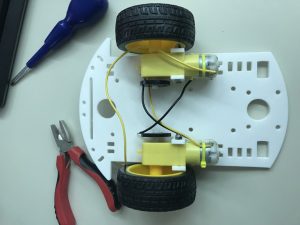
 Για την κίνηση του ρομπότ μας χρειαστήκαμε 2 DC motors με τις ρόδες τους. Αυτά συνδέθηκαν με τον οδηγό L298N που περιγράψαμε παραπάνω. Με αυτόν τον τρόπο μπορούμε να ελέγξουμε τις δύο ρόδες ξεχωριστά και με τους κατάλληλους συνδυασμούς να κάνουμε το ρομπότ μας να κινείται μπροστά πίσω αλλά και δεξιά αριστερά.
Για την κίνηση του ρομπότ μας χρειαστήκαμε 2 DC motors με τις ρόδες τους. Αυτά συνδέθηκαν με τον οδηγό L298N που περιγράψαμε παραπάνω. Με αυτόν τον τρόπο μπορούμε να ελέγξουμε τις δύο ρόδες ξεχωριστά και με τους κατάλληλους συνδυασμούς να κάνουμε το ρομπότ μας να κινείται μπροστά πίσω αλλά και δεξιά αριστερά.
8. Vibration motor
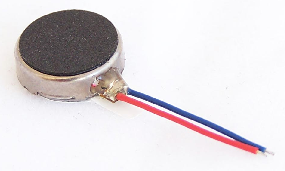
Χρησιμοποιήσαμε ένα μοτεράκι δόνησης για να ειδοποιεί τον τυφλό πως υπάρχει μπροστά του εμπόδιο, στέλνοντας μία δόνηση στο μπαστούνι που κρατάει. Με αυτόν τον τρόπο ο χρήστης του καθοδηγητή μας θα καταλαβαίνει πως θα γίνει αλλαγή της κατεύθυνσης κίνησής του.
ΤΡΟΠΟΣ ΚΑΤΑΣΚΕΥΗΣ:
Για την κατασκευή του robot πρωτίστως είναι αναγκαία η εκτύπωση της βάσης με τον 3D εκτυπωτή. Κατόπιν συνδέσαμε το dcmotor με το motordriverL298N. Όπως στην επόμενη εικόνα:
Συνδέσαμε τους αισθητήρες υπερήχων με την πλακέτα arduino mega.
Παρακάτω παραθέτουμε μερικές φωτογραφίες που βγάλαμε κατά την διάρκεια υλοποίησης του έργου μας.





Και μετά συνεχίσαμε προγραμματίζοντας…
Μπορείτε να βρείτε τον κώδικα μας στο αποθετήριο GitHub του σχολείου μας:
https://github.com/1lykeio-kavalas/robotics
στο αρχείο code.