Α. Σκοπός
Σκοπός του έργου “HandsFreeDriving” είναι η κατασκευή ενός έξυπνου ρομποτικού οχήματος το οποίο θα μπορεί να “ακούει” εντολές από τους χρήστες, όπως κινήσου 20cm ή στρίψε αριστερά και να εκτελεί τις αντίστοιχες κινήσεις. Επίσης, μακροεντολές όπως “εμπόδιο” ή “χόρεψε” θα δίνουν εντολή στο όχημα να προχωρά ευθεία μέχρι να βρει εμπόδιο ή να κινείται με τυχαίες τιμές για ένα χρονικό διάστημα. Κάθε φορά που το όχημα ολοκληρώνει μία κίνηση, θα ανακοινώνει κατάλληλο μήνυμα απο το ηχείο. Επίσης, όταν μία εντολή δεν γίνεται αντιληπτή, θα ανακοινώνεται επίσης ανάλογο μήνυμα.
Β. Υλικό
Για την εκτέλεση του παραπάνω έργου, απαιτείται το εξής hardware:
- Ένα Raspberry Pi 3, για να φιλοξενήσει τις υπηρεσίες ήχος – σε – κείμενο και κείμενο – σε – ήχο που περιγράφηκαν παραπάνω.
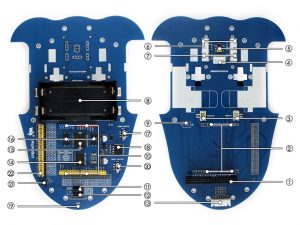
- Μία πλατφόρμα οχήματος σχεδιασμένη για Raspberry Pi 3. Αυτή που θα επιλεχθεί για το έργο είναι η AlphaBot της WaveShare.
- Μικρόφωνο και ηχείο.
AlphaBot
Το κόστος του εξοπλισμού αναλύεται ως εξής:
- ~33.5 ευρώ για την αγορά του raspberry pi 3
- (https://www.ebay.com/itm/Original-Raspberry-Pi-3-Model-B-Quad-Core-1-2GHz-64-bit-CPU-wifi-bluetooth/192099353359?epid=24019970648&hash=item2cba03830f:g:C~wAAOSw0ABankhY:rk:6:pf:0)
- ~58 ευρώ για την ρομποτική πλατφόρμα οδήγησης
- (https://www.ebay.com/itm/Waveshare-AlphaBot-Raspberry-Pi-Robot-Building-kit-Smart-car-includes-Camera/262732580491?epid=2080456011&hash=item3d2c15068b:g:y5MAAOSwEzxYTneI:rk:1:pf:0)
- ~3.5 ευρώ για ένα bluetooth ηχείο
- (https://mobilepoint.gr/index.php?route=product/product&product_id=292)
- ~1 ευρώ για ένα μικρόφωνο
- (https://www.ebay.com/itm/Mini-USB-Microphone-Professional-Mini-USB-External-Mic-Microphone-With-Clip/253700094909?hash=item3b11b43bbd:g:9XQAAOSwllpbKgAR:rk:2:pf:0)
Το συνολικό κόστος των υλικών ανέρχεται στα 96 ευρώ.
Γ. Λογισμικό
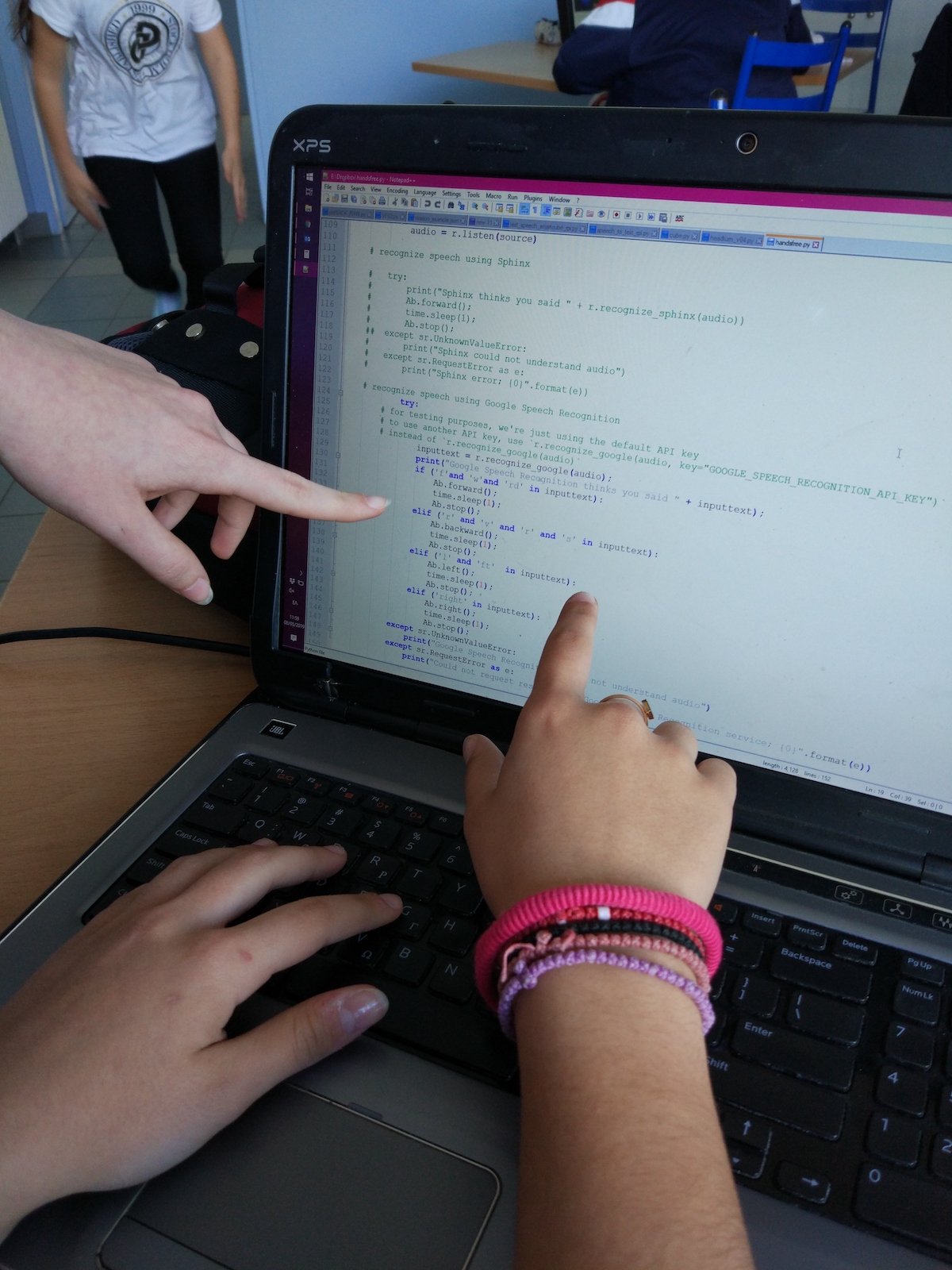
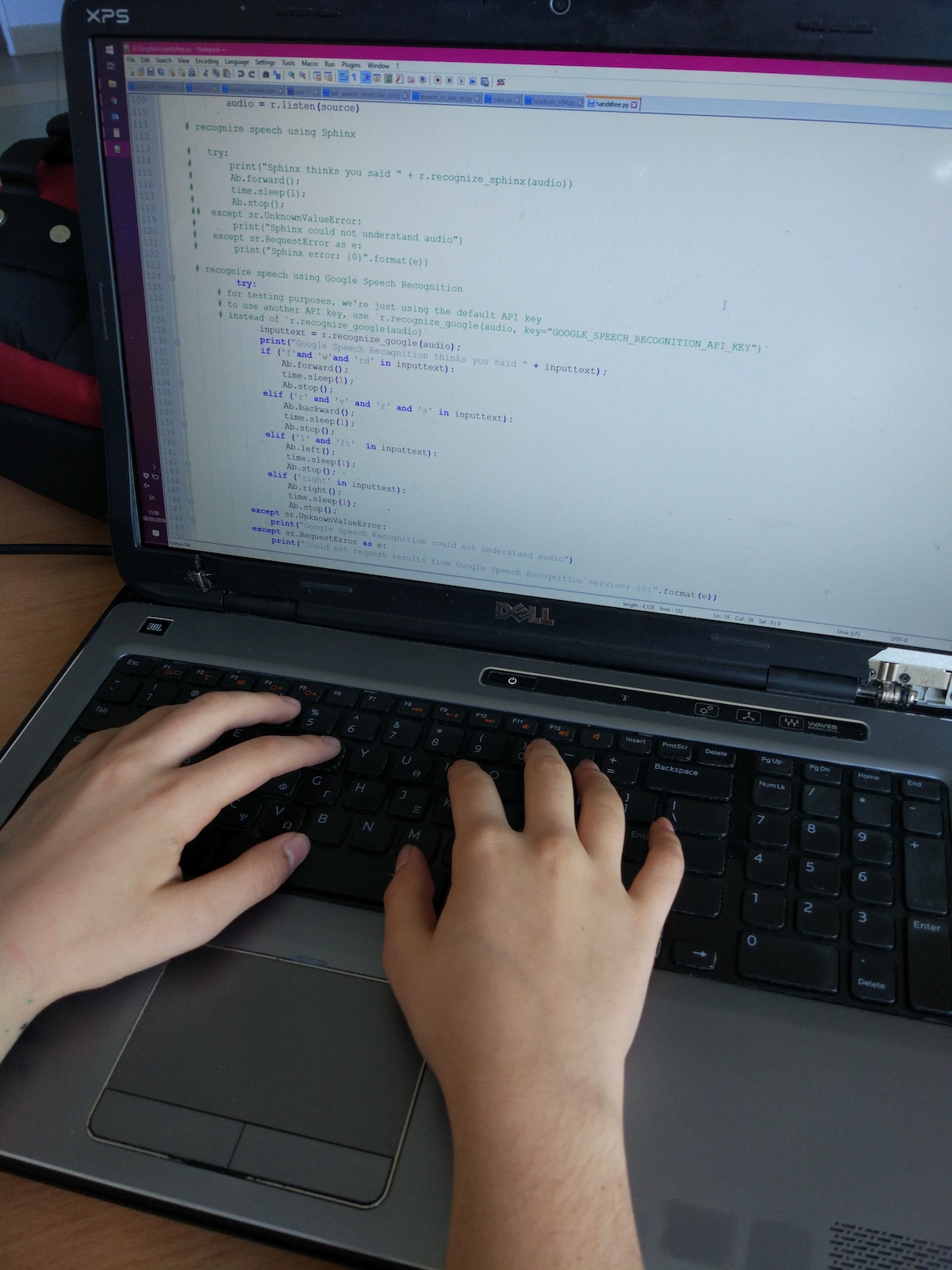
Το λογισμικό που θα αναπτυχθεί στα πλαίσια του έργου θα είναι γραμμένο σε Python. Οι βιβλιοθήκες που θα απαιτηθούν για την ολοκλήρωση των διαφόρων υποσυστημάτων θα είναι:
- Βιβλιοθήκη οδήγησης του ρομποτικού οχήματος
- https://www.waveshare.com/wiki/AlphaBot
- Βιβλιοθήκη για την μετατροπή της ομιλίας σε κείμενο (speech to text)
- https://pypi.org/project/SpeechRecognition/
- Βιβλιοθήκη για την μετατροπή κείμενου σε ομιλία (text to speech)
- https://pythonprogramminglanguage.com/text-to-speech/
Δ. Github
Ο σύνδεσμος του github για το έργο βρίσκεται εδώ: https://github.com/vtsakan/handsfreedriving
Ε. Εκπαιδευτικό σενάριο
Κατά την φάση υλοποίησης του έργου, οι μαθητές αναμένεται να ασχοληθούν με τα παρακάτω αντικείμενα:
- Προγραμματισμός Python
- Ακολουθιακός προγραμματισμός
- Εισαγωγή στον τμηματικό προγραμματισμό
- Μαθηματικά
- Ανάλογα ποσά (βαθμονόμηση ρομποτικού οχήματος)
Η υλοποίηση του έργου αναμένενται να στηριχθεί απο αρκετές εκπαιδευτικές ώρες, σε διάστημα 4 μηνών. Η πρώτη έκδοση του OER φαίνεται εδώ: OER_HANDSFREEDRIVING_v01. Φυσικά, μετά την ολοκλήρωση της κατασκευής, θα συμπληρωθεί με τις λεπτομέρειες του έργου, καθώς και με χρήσιμη πληροφορία σχετικά με την εκπαιδευτική διαδικασία απο την οποία προήλθε.
ΣΤ. Προγραμματισμός υλοποίησης
Το project θα έχει τις εξής φάσεις:
- Σχεδιασμός – Εκπαίδευση
- Καταγραφή των λειτουργιών που θα εκτελεί το ρομποτικό όχημα. Οι μαθητές θα πρέπει να υλοποιήσουν σίγουρα τις κινήσεις (α) προχώρα +-x cm, (β) στρίψε +-x μοίρες, καθώς και τις μακροεντολές (α) “εμπόδιο” και (β) χόρεψε. Απο εκεί και πέρα θα γίνει συζήτηση για το τι άλλες λειτουργίες θα υλοποιηθούν.
- Οι μαθητές θα χωριστούν σε 3 ομάδες. Η πρώτη ομάδα θα αναλάβει την κίνηση (α), η δεύτερη την κίνηση (β) και η τρίτη τις μακροεντολές.
- Η πρώτη ομάδα θα συναρμολογήσει το ρομποτικό όχημα. Οδηγίες υπάρχουν εδώ.
- H δεύτερη ομάδα θα εξοικειωθεί με τον driver του Alphabot (βασικές εντολές) και θα αναλάβει να δημιουργήσει μία παρουσίαση για να εκπαιδεύσει τις άλλες 2 ομάδες.
- Η τρίτη ομάδα θα σχεδιάσει τον τρόπο με τον οποίο θα συνδεθούν το μικρόφωνο και το ηχείο και θα εξεερευνήσει τις βιβλιοθήκες text2speech και speech2text. Επίσης θα αναλάβει να δημιουργήσει μία παρουσίαση για να εκπαιδεύσει τις άλλες 2 ομάδες.
- Υλοποίηση – Προγραμματισμός
- Η υλοποίηση του έργου θα ακολουθήσει την λογική της σπειροειδούς ανάπτυξης. Σε αυτή την φάση οι μαθητές συνεχίζουν να δουλεύουν σε 3 ομάδες, και ασχολούνται με τις εργασίες που αναφέρθηκαν στο (1.2)
- Φάση 1: Οι μαθητές δίνουν εντολές απο το πληκτρολόγιο για να κινηθεί το ρομπότ. Βαθμονόμηση του οχήματος.
- Φάση 2: Οι μαθητές χρησιμοποιούν τις βιβλιοθήκες text2speech και speech2text και αντιστοιχούν συγκεκριμένες εκφράσεις με συγκεκριμένες κινήσεις.
- Φάση 3: Οι μαθητές εκτελούν τα πρώτα ολοκληρωμένα σενάρια και επιστρέφουν στον κώδικα για διορθώσεις.
- Φάση 4: Οι μαθητές βάζουν σχόλια σε όλο τον κώδικα.
- Η υλοποίηση του έργου θα ακολουθήσει την λογική της σπειροειδούς ανάπτυξης. Σε αυτή την φάση οι μαθητές συνεχίζουν να δουλεύουν σε 3 ομάδες, και ασχολούνται με τις εργασίες που αναφέρθηκαν στο (1.2)
Σε όλη την διάρκεια του έργου ένας μαθητής απο κάθε ομάδα θα έχει πρόσβαση στο “Ημερολόγιο Κατασκευής”, ένα ημερολόγιο που θα καταγράφεται η δουλειά κάθε συνάντησης καθώς και τα προβλήματα που αντιμετωπίστηκαν, και πως αυτά ξεπεράστηκαν.
Ζ. Συνοπτική παρουσίαση του έργου